เปลี่ยนภาษา :
ซอฟต์แวร์ควบคุมหุ่นยนต์ igus
โปรแกรม จำลอง และควบคุมหุ่นยนต์โดยไม่ต้องมีใบอนุญาต
ซอฟต์แวร์ควบคุมหุ่นยนต์ของ igus ช่วยให้สามารถตั้งโปรแกรมและควบคุมระบบหุ่นยนต์ได้ง่ายและใช้งานง่าย ทำให้สามารถเริ่มต้นใช้งานระบบอัตโนมัติได้ง่าย ด้วยโครงสร้างแบบโมดูลาร์ จึงสามารถควบคุมการเคลื่อนไหวของหุ่นยนต์ต่างๆ เช่น หุ่นยนต์เดลต้า หุ่นยนต์เชิงเส้น และหุ่นยนต์ข้อต่อหลายแกนได้ ซอฟต์แวร์นี้สามารถใช้จำลองการเคลื่อนไหวแต่ละส่วนของหุ่นยนต์บนพื้นผิว 3 มิติได้ โดยไม่จำเป็นต้องเชื่อมต่อหุ่นยนต์ในขั้นตอนนี้
สิ่งที่คุณจะพบในหน้านี้
ซอฟต์แวร์หุ่นยนต์ฟรี
ตัวอย่างการเขียนโปรแกรมการใช้งานต่างๆ ด้วยซอฟต์แวร์หุ่นยนต์
- การเชื่อมต่อที่ง่ายดายระหว่างหุ่นยนต์และระบบควบคุม
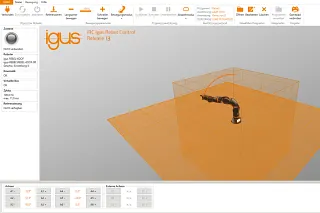
- การใช้งานที่ง่ายด้วยอินเทอร์เฟซ 3 มิติและดิจิทัลทวิน ช่วยให้สามารถสั่งงานและตรวจสอบลำดับการเคลื่อนที่ได้โดยตรง
- การกำหนดค่าอินเทอร์เฟซกล้อง สามารถทำได้โดยตรงผ่านระบบควบคุมและซอฟต์แวร์
- การเขียนโปรแกรมสำหรับหุ่นยนต์แบบเดลต้า, เชิงเส้น, SCARA และแขนกล
- ซอฟต์แวร์ช่วยให้สามารถทดสอบได้อย่างไร้ความเสี่ยง แม้กระทั่งก่อนการสั่งซื้อ
ข้อกำหนดของระบบ:
- PC ที่ใช้ระบบปฏิบัติการ Windows 10
- การสื่อสารผ่าน Ethernet หรือ WLAN
- พื้นที่ว่างบนดิสก์ 500MB
ตัวอย่างโปรแกรม วิกิ และหลักสูตรฝึกอบรม



อินเทอร์เฟซ
อินเทอร์เฟซ PLC
อินเทอร์เฟซ PLC (PLC = Programmable Logic Controller) ช่วยให้สามารถดำเนินการฟังก์ชันพื้นฐานและการส่งสัญญาณสถานะต่างๆ โดยใช้อินพุตและเอาต์พุตดิจิทัล นอกจากการควบคุมโดย PLC แล้ว อินเทอร์เฟซนี้ยังช่วยให้สามารถใช้งานผ่านปุ่มฮาร์ดแวร์ได้อีกด้วย
อินพุตและเอาต์พุตดิจิตอล
สามารถโหลดและเริ่มต้นโปรแกรมหุ่นยนต์ได้ และสามารถส่งคำสั่งของ Gripper ได้โดยใช้อินพุตดิจิทัลหรือสัญญาณทั่วไป ซึ่งมีประโยชน์ เช่น เมื่อต้องเลือกโปรแกรมจากการเลือกที่กำหนดโดยใช้ปุ่มหรือคำสั่ง CRI-GSig
Modbus TCP/IP
อินเทอร์เฟซ Modbus TCP ใช้ในการส่งข้อมูลและคำสั่ง PLC ไปยังระบบควบคุมหุ่นยนต์และรับข้อมูลสถานะ เป็นต้น
อินเทอร์เฟซ CRI
อินเทอร์เฟซ CRI ช่วยให้สามารถส่งคำสั่งที่ซับซ้อนได้ และสามารถรับข้อมูลและการตั้งค่าต่างๆ ได้ผ่านอินเทอร์เฟซอีเทอร์เน็ตโดยใช้ TCP/IP ระบบควบคุมหุ่นยนต์ของ igus ใช้อินเทอร์เฟซนี้เพื่อเชื่อมต่อกับหุ่นยนต์ที่มีระบบควบคุมแบบบูรณาการหรืออินสแตนซ์อื่นๆ ของระบบควบคุม
กล้องอินเตอร์เฟซ
อินเทอร์เฟซกล้องช่วยให้สามารถใช้การตรวจจับวัตถุและกล้องวิดีโอได้ กล้องตรวจจับวัตถุจะจดจำตำแหน่งและประเภทของวัตถุแล้วส่งภาพวิดีโอไปยังระบบควบคุมโดยอาจใช้ภาพวิดีโอก็ได้ ระบบควบคุมจะคำนวณตำแหน่งในระบบพิกัดหุ่นยนต์จากตำแหน่งวัตถุของกล้อง กล้องวิดีโอเพียงอย่างเดียวจะส่งภาพเท่านั้น จึงใช้ตรวจสอบพื้นที่ทำงานเท่านั้น แต่ไม่สามารถตรวจจับวัตถุได้
คลาวด์
อินเทอร์เฟซคลาวด์ช่วยให้สามารถตรวจสอบหุ่นยนต์ได้ผ่าน RobotDimension เมื่อเปิดใช้งานและเข้าสู่ระบบแล้ว หุ่นยนต์จะส่งข้อมูลสถานะพื้นฐานและภาพจากกล้องไปยังบริการออนไลน์ ผู้ใช้สามารถลงรายการหุ่นยนต์ของตนบนเว็บไซต์และเรียกค้นข้อมูลดังกล่าวได้
ROS, Matlab, LabView และอื่นๆ อีกมากมาย
รวมหุ่นยนต์เข้ากับสภาพแวดล้อม ROS ของคุณ เอกสารประกอบและแพ็คเกจสำหรับการสื่อสารด้วยฮาร์ดแวร์ Teleop และ moveI
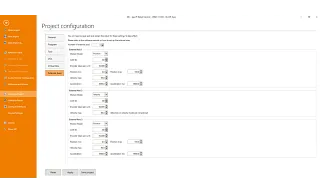
การกำหนดค่าของโปรเจ็กต์
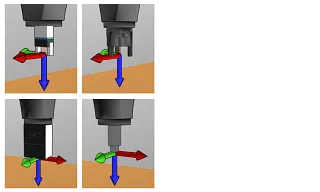
กริปเปอร์
สามารถระบุเครื่องมือที่ประกอบไว้ที่นี่ได้ การเปลี่ยนเครื่องมือต้องโหลดโครงการใหม่หรือเริ่มระบบควบคุมแบบบูรณาการใหม่ เครื่องมือใหม่สามารถกำหนดเป็นไฟล์กำหนดค่าในไดเร็กทอรี "Data/Tools"
Virtual box
ขอบเขตการเคลื่อนไหวของแขนหุ่นยนต์ถูกจำกัดด้วยการตั้งค่าของกล่องเสมือน ฟังก์ชันนี้ช่วยป้องกันความเสียหายทางกลไกและทำให้การเขียนโปรแกรมง่ายขึ้น ขึ้นอยู่กับการใช้งาน หากโปรแกรมถูกดำเนินการซึ่งละเมิดกล่องเสมือน โปรแกรมนั้นจะถูกหยุดพร้อมข้อความแสดงข้อผิดพลาด
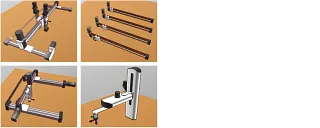
แกนภายนอก
ระบบควบคุมหุ่นยนต์รองรับแกนเพิ่มเติมสูงสุด 3 แกน (เรียกอีกอย่างว่า "แกนภายนอก" ใน iRC) สามารถติดตั้งตามแกนของหุ่นยนต์และกำหนดค่าได้ผ่านพื้นที่กำหนดค่าของ iRC

รายการโปรแกรม
ที่นี่คุณสามารถกำหนดหุ่นยนต์และโปรแกรมตรรกะ ความเร็วในการเคลื่อนที่ (เป็นเปอร์เซ็นต์ของความเร็วสูงสุด) โหมดการเล่นซ้ำ และการตอบสนองต่อข้อผิดพลาดของโปรแกรม
กลไกการเคลื่อนที่พิเศษ
ระบบควบคุมหุ่นยนต์สามารถปรับแต่งให้เข้ากับหุ่นยนต์ของคุณได้ด้วยดิจิทัลทวิน เรากำหนดค่าอินเวอร์สคิเนเมติกส์ให้เหมาะสมกับธุรกิจโครงการของคุณ
การเขียนโปรแกรม
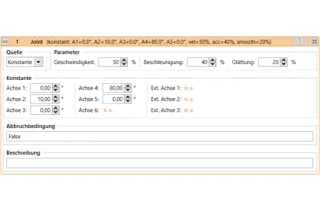
การเคลื่อนที่ของแกน
คำสั่ง Joint จะย้ายหุ่นยนต์ไปยังตำแหน่งเป้าหมายที่แน่นอนซึ่งระบุอยู่ในพิกัดแกน (เช่น มุมแกนหรือตำแหน่งของแกนลิเนียร์) การเคลื่อนไหวที่เกิดขึ้นของ TCP มักจะเป็นเส้นโค้ง ไม่ใช่เส้นตรง
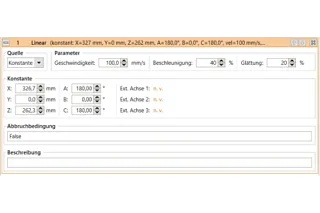
การเคลื่อนที่ลิเนียร์
คำสั่งลิเนียร์จะเคลื่อนย้ายหุ่นยนต์ไปยังตำแหน่งเป้าหมายที่แน่นอนตามพิกัดคาร์ทีเซียน การเคลื่อนที่ของ TCP ที่เกิดขึ้นจะเคลื่อนที่เป็นเส้นตรง
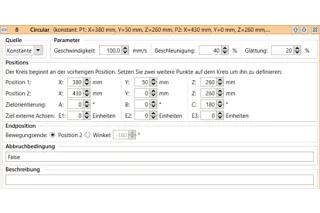
การเคลื่อนไหวแบบวงกลม
คำสั่ง "การเคลื่อนที่แบบวงกลม" ช่วยให้สามารถเคลื่อนที่ไปตามเส้นทางวงกลมทั้งหมดหรือบางส่วนได้ โดยเข้ากันได้กับการเคลื่อนที่เชิงเส้น จึงทำให้การเปลี่ยนผ่านจากการเคลื่อนที่เชิงเส้นเป็นการเคลื่อนที่เชิงเส้นได้อย่างราบรื่น
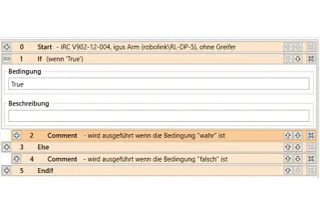
เงื่อนไข
สามารถใช้เงื่อนไขในคำสั่ง if-then-else ลูป และเงื่อนไขการยกเลิกในคำสั่งการเคลื่อนที่ เงื่อนไขสามารถเป็นการผสมผสานของอินพุตดิจิทัล สัญญาณทั่วโลก การดำเนินการบูลีน และการเปรียบเทียบ
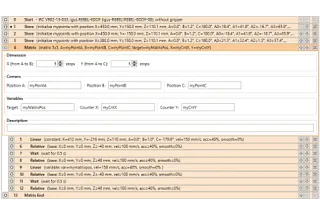
การคำนวณเมทริกซ์
คำแนะนำแบบกริดจะคำนวณตำแหน่งที่เรียงตามกริด เช่น ตำแหน่งการจับหรือการวางสำหรับงานวางบนพาเลท
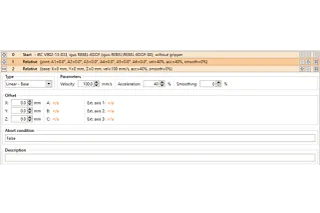
Relative
คำสั่ง Relative ช่วยให้คุณสามารถเคลื่อนย้ายหุ่นยนต์ตามตำแหน่งปัจจุบันได้ โดยสามารถเข้าถึงได้จากรายการเมนูภายใต้ "Action" → "Relative movement"

โปรแกรมย่อย
สามารถเรียกใช้โปรแกรมย่อยได้โดยใช้คำสั่งย่อย เส้นทางไปยังไฟล์โปรแกรมย่อยระบุไว้ภายใต้ "ชื่อไฟล์" เส้นทางดังกล่าวสัมพันธ์กับโฟลเดอร์ย่อย "Programs" ของโฟลเดอร์ "Data" ของ iRC
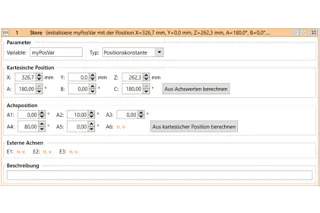
ตัวแปรและการเข้าถึงตัวแปร
โปรแกรมสำหรับ igus Robot Control และ TinyCtrl รองรับตัวแปร 2 ประเภท:
- ตัวแปรตัวเลข: ใช้ในการจัดเก็บตัวเลขจำนวนเต็มหรือจำนวนจุดลอยตัว
- ตัวแปรตำแหน่ง: ตัวแปรเหล่านี้สามารถใช้ในการจัดเก็บตำแหน่งคาร์ทีเซียนและตำแหน่งร่วม ตัวแปรดังกล่าวจะถูกตีความว่าเป็นตำแหน่งคาร์ทีเซียนหรือตำแหน่งร่วมนั้นขึ้นอยู่กับบริบท
ดาวน์โหลดซอฟต์แวร์หุ่นยนต์

ซอฟต์แวร์ควบคุมหุ่นยนต์ igus ที่ไม่มีลิขสิทธิ์ ถูกผสานรวมเข้ากับระบบควบคุม ดังนั้นจึงใช้แนวคิดการทำงานมาตรฐานและบริการการสื่อสารที่สม่ำเสมอสำหรับส่วนประกอบต่างๆ มากมายในระบบเดียว ซึ่งหมายความว่างานวางแผนโครงการจะน้อยลงและการใช้งานจะเร็วขึ้น
- ทดสอบจลนศาสตร์ของ igus ทั้งหมดล่วงหน้าในซอฟต์แวร์
- ด้วยโครงการที่ตั้งโปรแกรมไว้ล่วงหน้าสำหรับหุ่นยนต์ igus แกนเดี่ยว และ AGV ทั้งหมด
- อินเทอร์เฟซ 3D ที่ใช้งานง่ายพร้อมการจำลองหุ่นยนต์
การให้คำปรึกษา
พร้อมให้คำตอบทุกข้อสงสัย

การจัดส่งและให้คำปรึกษา
In person:
วันจันทร์ - วันศุกร์: เวลา 08.30 น. - 17.30 น.
Online:
ตลอด 24 ชั่วโมง
Line Chats:
วันจันทร์ – วันศุกร์ : เวลา 08.30 น. – 17.30 น.